3 Sistema Motor a pasos NEMA23 2.2N·m 2DM556


$3,211.55 + IVA
1 disponibles
Crédito sujeto a aprobación.
¿Tienes dudas? Consulta nuestra Ayuda.
3 Sistema Motor a pasos NEMA23 2.2N·m 2DM556
3 Conector de 4 borneras Plug Macho
3 Conector de 4 borneras Plug Hembra
3 Conector 4 pin Hembra CNC ROUTER
15 Cable 4 vías calibre 18 AWG
El motor a pasos está exclusamente hecho sobre los requisitos de OpenBuilds Mexico. Recomendable de usar la fuente de poder CNC de 24 o 36VDC para mejor agilidad, precisión y torque. El motor a pasos NEMA23 2.2N·m es ideal para la mayoría de sus proyectos que requieran un alto torque.
El motor a pasos es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor se comporta de la misma manera que un conversor digital-analógico (D/A) y puede ser gobernado por impulsos procedentes de sistemas lógicos. Este motor presenta las ventajas de tener alta precisión y repetitividad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente.
2DM556 es un controlador (driver) para un motor a pasos híbrido con una entrada de tensión de 24 a 48 VDC/VCC, diseñado para ser usado con un motor que tiene un cuerpo de 57mm, 60mm o 86mm de ancho y está clasificado con corriente de fase de hasta 5.6A. El procesador de señal digital (DSP) usado en el 2DM556 es similar a un control servo, lo que resulta en un funcionamiento más suave, menos ruidoso, menos vibración, mayor par de retención a alta velocidad y una mayor precisión de posicionamiento. El 2DM556 puede utilizarse en dispositivos de control numérico de tamaño medio y grande, como máquinas curvadoras, CNC, bordadoras y empaquetadoras. El torque de retención a alta velocidad es significativamente mayor que otros controladores análogos sin DSP como los populares TB6560 y TB6600.
CONEXÍON
TERMINAL | FUNCIÓN
PUL + (+5V) | Entrada de pulso terminal positivo, 3.3 a 5.0 VDC/VCC **
PUL – (PUL) | Entrada de pulso terminal negativo
DIR + (+5V) | Entrada de la dirección terminal positivo, 3.3 a 5.0 VDC/VCC **
DIR – (DIR) | Entrada de la dirección terminal negativo
ENA + (+5V) | Entrada de activación del controlador terminal positivo * , 3.3 to 5.0 VDC/VCC **
ENA – (ENA) | Entrada de activación del controlador terminal negativo
ALM + (+5V) | Salida de error / alarma del controlador terminal positivo, 5.0 VDC/VCC **
ALM – (ALM) | Salida de error / alarma del controlador terminal negativo
DC – | Entrada principal de voltaje terminal negativo
DC + | Entrada principal de voltaje terminal negativo, 24 hasta 60 VDC/VCC **
A + | Salida positiva fase A del motor a pasos, color cable ROJO
A – | Salida negativa fase A del motor a pasos, color cable AZUL
B + | Salida positiva fase B del motor a pasos, color cable NEGRO
B – | Salida negativa fase B del motor a pasos, color cable VERDE
* Esta señal se utiliza para activar / desactivar el controlador. Nivel (VDC/VCC) alto para habilitar el controlador y nivel bajo para deshabilitar el controlador. Algunos controladores CNC dejar el controlador habilitado para una respuesta más rápida y mantiene el torque de retención. ** Voltaje Corriente Continua
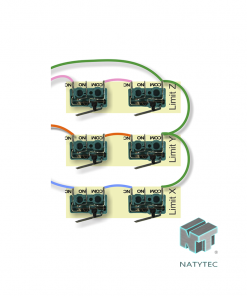
SEÑALES
Las señales de control pueden estar activas en niveles altos y bajos. Cuando el nivel alto está activo, todas las señales negativas de control se conectarán a la tensión negativa, o terminal de tierra, del controlador CNC (GND). Cuando el nivel bajo está activo, todas las señales positivas de control serán conectadas al terminal de tensión positiva del controlador CNC.





COLOCACIÓN
Mantenga 20mm entre y alrededor de cada controlador del motor a pasos. Evite colocarlo junto a otros dispositivos de calefacción. Manténgase alejado del aceite, gas, humedad y fuertes vibraciones. Flujo de aire sobre superficie es necesario para que el controlador puede disipar 120W de calor. Recomendamos de usar al menos un ventilador de 80x25mm con capacidad de 35CFM como extractor por cada 4 controladores, un ventilador de entrada del mismo tamaño es recomendable. El controlador se coloca con dos tornillos de M4. El motor se coloca con dos a cuatro tornillos M5.
CARACTERÍSTICAS
- Ángulo de paso: 1.8º ±5%
- Tensión de alimentación: 24 a 60 VDC
- Corriente entrada DC / CC: 5.6A
- Consumo máximo: 120W
- Voltaje recomendado: 24 a 36 VDC / VCC
- Rango de voltaje: 24 a 60 VDC / VCC
- Máximo PPS: 5000
- Máximo PPS al inicio: 2500
- Protección interna: 8.0A
- Frecuencia de entrada de pulso máximo: 200kHz
- Tiempo de bajo nivel: 2.5µseg
- Humedad relativo máximo: 90%
- Vibración máximo: 5.9m/s²
- Enfriamiento natural o aire forzado
- E/S (I/O) de señal opto-aislada
- Velocidad de comunicación: 57.6kbps
- Protección sobretensión, bajo voltaje, sobrecorrección, cortocircuitos de fase
- Terminal de entrada de comando sin conexión
- Temperatura de operación: -10°C a +40°C
- Temperatura ambiental de almacenamiento: -20ºC a 80ºC
- Ambiental: Sin condensación, sin gotas de agua, mantener alejado de los gases si el equipo está en funcionamiento
- Control de corriente media, accionamiento de corriente de salida sinusoidal de 2 fases
- Fases motor: 2
- Torque de sujeción: 2.2N·m (22.43kg·cm o 312oz·in)
- Resistencia por fase (@20ºC): 0.4Ω ±10%
- Torque del rotor: 520g·cm²
- Inducción por fase: 1.8mH ±20%
- Par torque: 7.0N·cm Ref.
- Resistencia aislamiento motor: ≥100MΩ (500vDC) clase B
- Tamaño del eje motor: 6.35mm
- Longitud del eje: 21mm
- Peso motor: 1.15kg
- Peso controlador / driver: 0.26kg
- Dimensiones motor: 80.0 x 57.0 x 57.0mm
- Dimensiones controlador: 118.0 x 75.5 x 34.0mm
- Cableado: cable AWG22 / 0,324mm², 300mm ±10mm
Productos relacionados